Module


GMT GSS100D High-Precision Hexapod Platform
★
6-DOF parallel kinematic platform
★
High-precision EtherCAT full closed-loop control
★
Designed for SiPh, FAU active alignment, vision servo, and precision assembly
★
Supports screw motion, area scanning
★
Optical power direct search, and vision feedback (Optional)
- Specifications
- Technical Data
- Image Download
Product Overview
Updated: May 27, 2026
Motion
|
Model |
GSS100D |
| Active Axes | X、Y、Z、θX、θY、θZ |
| Travel Range in X、Y、Z(mm) | ±16、±16、±6.5 |
| Rotation Range in θX、θY、θZ( ° ) | ±10、±10、±20 |
| Maximum Velocity in X、Y、Z(mm/s) | 10 |
| Recommended Velocity in X、Y、Z(mm/s) | 5 |
| Maximum Angular Velocity in θX、θY、θZ(mrad/s) | 200 |
| Recommended Angular Velocity in θX、θY、θZ(mrad/s) | 100 |
Positioning
| Minimum Resolution(nm) | 15 |
| Minimum Incremental Motion in X、Y、Z(µm) | 1、1、0.5 |
| Minimum Incremental Motion in θX、θY、θZ(µrad) | 12、12、25 |
| Repeatability in X、Y、Z(µm) | ±0.5、±0.5、±0.2 |
| Repeatability in θX、θY、θZ(µrad) | ±6、±6、±10 |
| Backlash in X、Y、Z(µm) | 0.5、0.5、0.2 |
| Backlash in θX、θY、θZ(µrad) | 5、5、10 |
Mechanical Properties
| Payload Capacity, Any Orientation(kg) | 0.9 |
| Payload Capacity, Horizontal(kg) | 2.5 |
| Holding Force without Power, Any Orientation(N) | 2.5 |
| Holding Force without Power, Horizontal(N) | 15 |
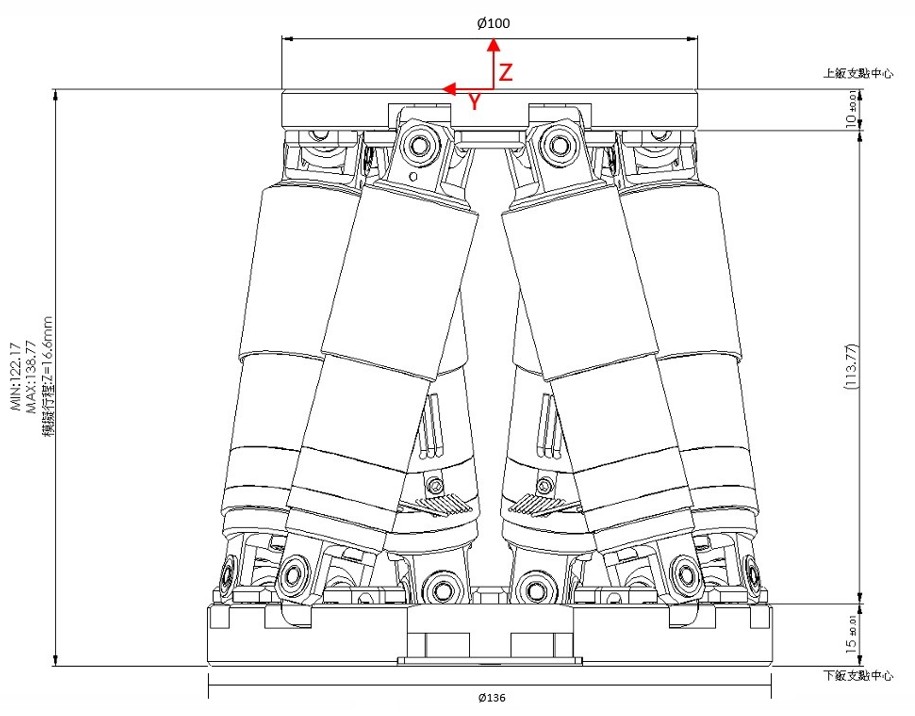
| Home Height(mm) | 130.5 |
| Upper Platform Diameter(mm) | Φ100 |
| Base Platform Diameter(mm) | Φ136 |
Controller
| Number of Axes | 6 |
| Motor Control | EtherCAT Full Closed-Loop |
| Communication Interface | Ethernet / USB |
| Main Board | NEX-619 |
| Analog EtherCAT I/O | AMAX-4817 |
| Input Voltage | 80–264 VAC |
| Input Current | 4.2 A / 115 VAC |
| Controller Dimensions(mm) | 356*402.8*128.5 |
| Controller Weight(kg) | 8 |
| Controller Interface | Dedicated power / encoder, HDMI, USB 3.0, Ethernet, RS232, BNC |
Software Functions
|
Function Group |
Description |
| Standard Functions | Jogging, point-to-point linear motion, Screw motion, and area scanning trajectories |
| Trajectory Library | Spiral, rectangular spiral, sine, triangle wave, sawtooth wave, square wave, and Lissajous trajectory |
| Optional Functions | Maximum optical power search, hybrid optical power search, and vision servo control |