Standard Motorized Stages
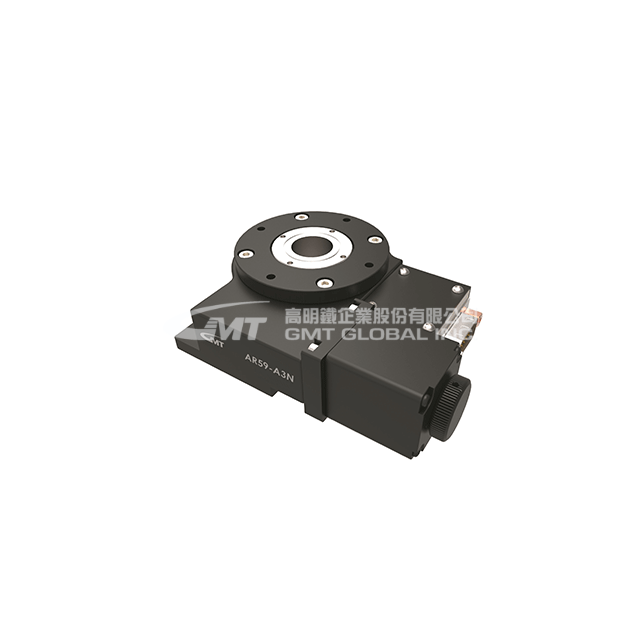
AR59 - Standard
★
Guide-Deep Groove Ball Bearing, It enables the bearings to accommodate radial and axial loads in both directions to reach high precision and high speed- revolving.
★
Transmission parts-Worm & Worm Gear, It transmits through the gear and is usually used in Reducer.
★
Material-Aluminum Alloy
★
Model Shown: AR59-A3NN-ND
- Specifications
- Technical Data
- Image Download
Total of 1 models
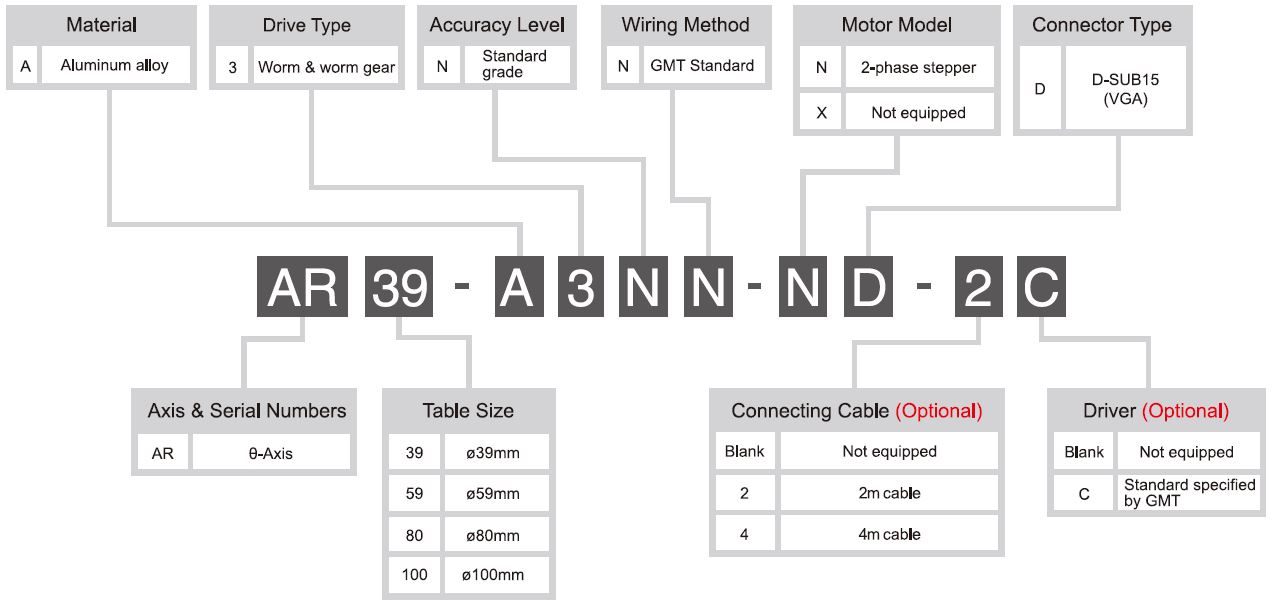
| Model | AR59-A3NN-ND |
|---|---|
| Inquiry | Add To Inquiry |
| Table Size (mm) | Ø 59 |
| Travel distance (°) | 360 |
| Drive Type | Worm gear (reduction ratio 1/180) |
| Rail | Deep groove ball bearings |
| Stage Material | Aluminum Alloy |
| Surface Treatment | Black anodizing |
| Main Unit Weight (Kg) | 0.6 |
| Coupling | FSMMS12-5*6 |
| Accuracy Level | N: Standard type |
| Outgoing cable type (connector type) | N: Normal qualification |
| Resolution (pulse) (°) | 0.01 (Full) / 0.005 (Half) |
| Maximum speed (full-range) (°/sec) | 15 |
| One-way positioning accuracy (°) | 0.1 |
| Repeat positioning accuracy (°) | ± 0.05 |
| Load Capacity (Kgf) | 4 |
| Idling (°) | 0.1 |
| Parallelism (µm) | 50 |
| Dynamic Straightness (µm) | 30 |
| Dynamic Parallelism (µm) | 30 |
| Motor_Type/Shaft Numbers | 2-phase stepper motor / ☐ 28 dual output shafts |
| Motor_Brand/Model | GMT / 2MS-N28D32A |
| Driver brand/model | GMT / GDL22G-D |
| Connector_Stage Side Connector | 15-Pin male end connetor D-SUB / 12-Pin male end connetor HRS |
| Connector_Controller Side Connector | 15-pin female connector D-SUB / 12-pin female connector HRS (optional) |
| Sensor_Origin Sensor | Photoelectric sensor GMT-sensor |
| Sensor_Limit Sensor | Photoelectric sensor GMT-sensor |
| Sensor_Power Voltage | 24V ± 10% |
| Sensor_Control Output | NPN open collector output under 24V 8mA |
| Sensor_Output Control | Detection (during sensing): Output transistor OFF (non-conducting) |
Product Overview
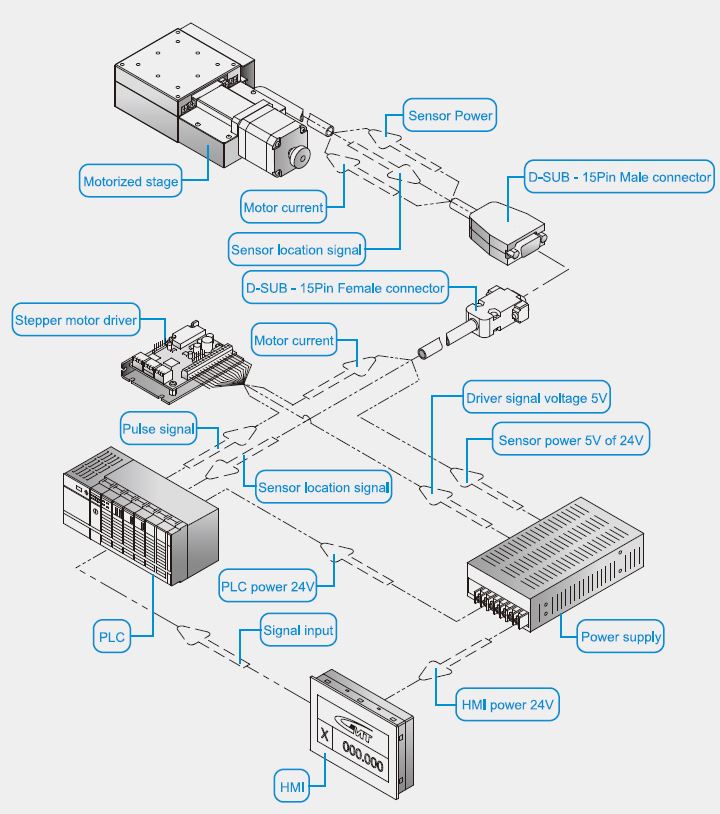
System Configuration Diagram
♦ For selection of the drivers preferred, please refer to the reference table or the catalogue of Motor・Driver.
♦ All of the drivers chosed are the specification of GMT preferred. For different needs, please choose the suitable drivers according to real functional needs.
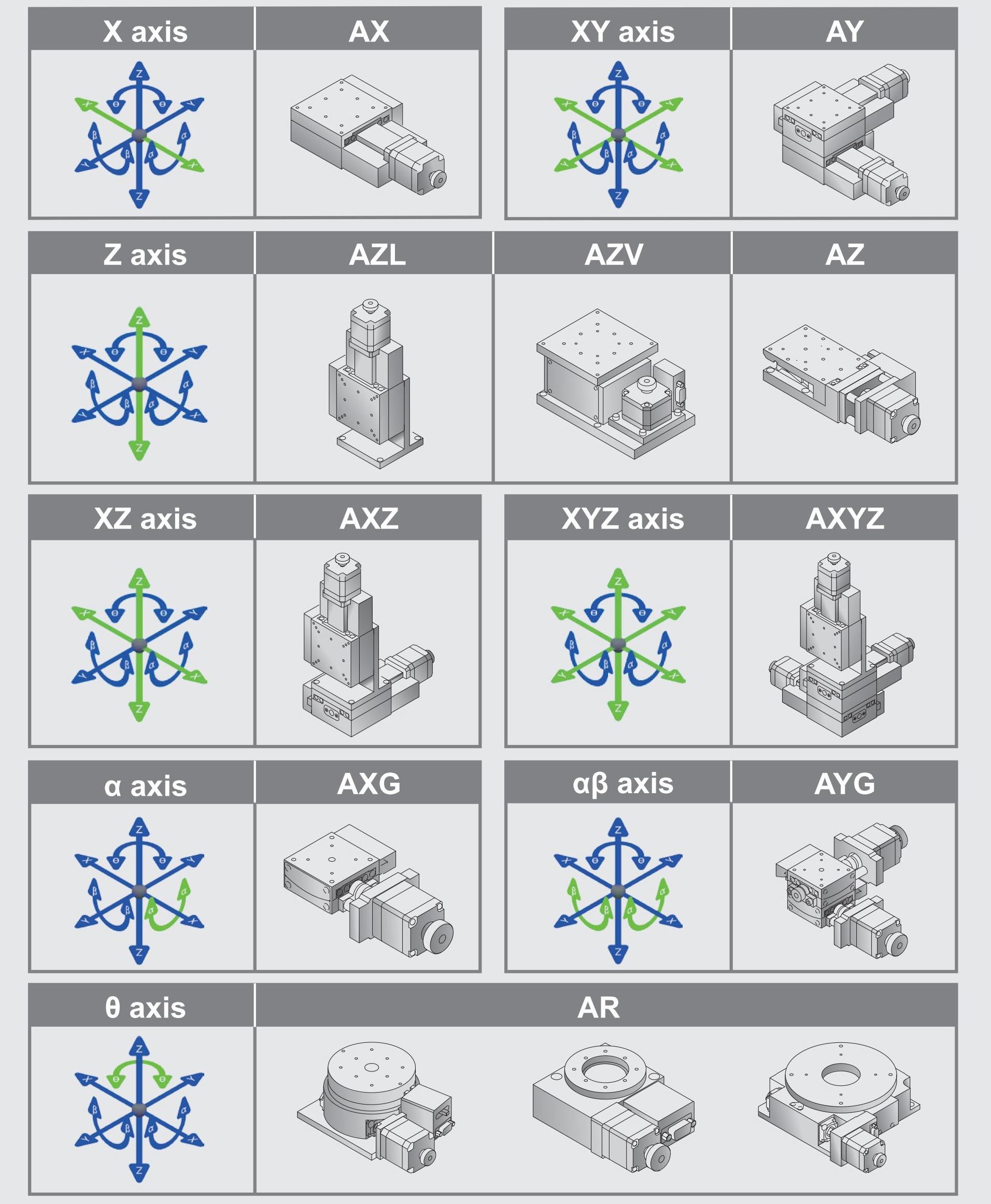
Axis Definition
GMT has defined different axis as the following figuration according to the movement direction:
Horizontal movement direction is X and Y axis.
Vertical movement direction is Z axis.
Movement around X, Y, Z axis is defined to α axis, β axis, and θ axis.
Green arrows present the specified axis movement direction.
Motor•driver Reference Table
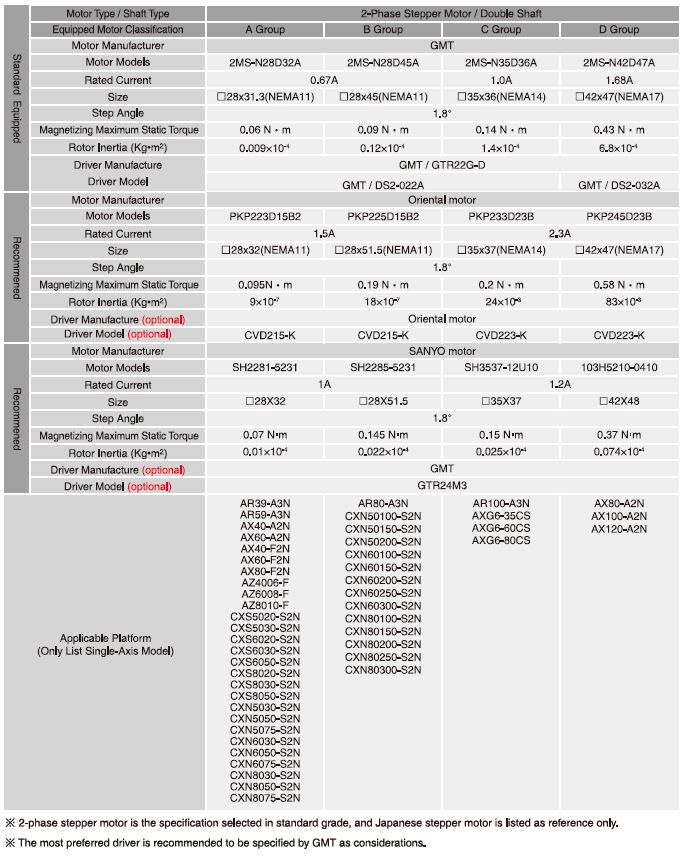
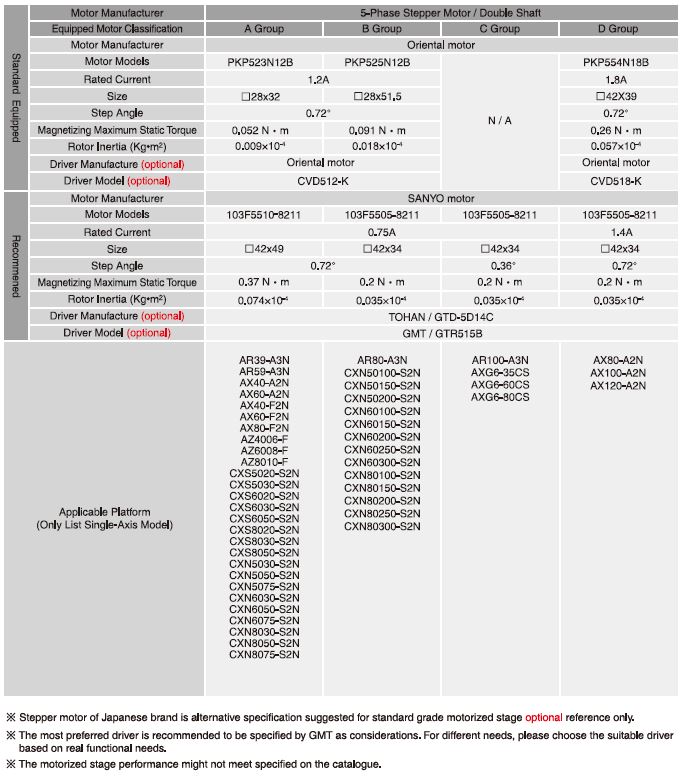
Electrical specifications

Comparison Table
Electric slide table and connecting cable
Introduction to Electromagnetic Brake Stepper Motors
Introduction to Feedback Stepper Motors
Rotary slide detection method (θ axis)
Model
AR59-A3NN-ND

AR59-A3NN-NH